摆线关节模组

产品介绍
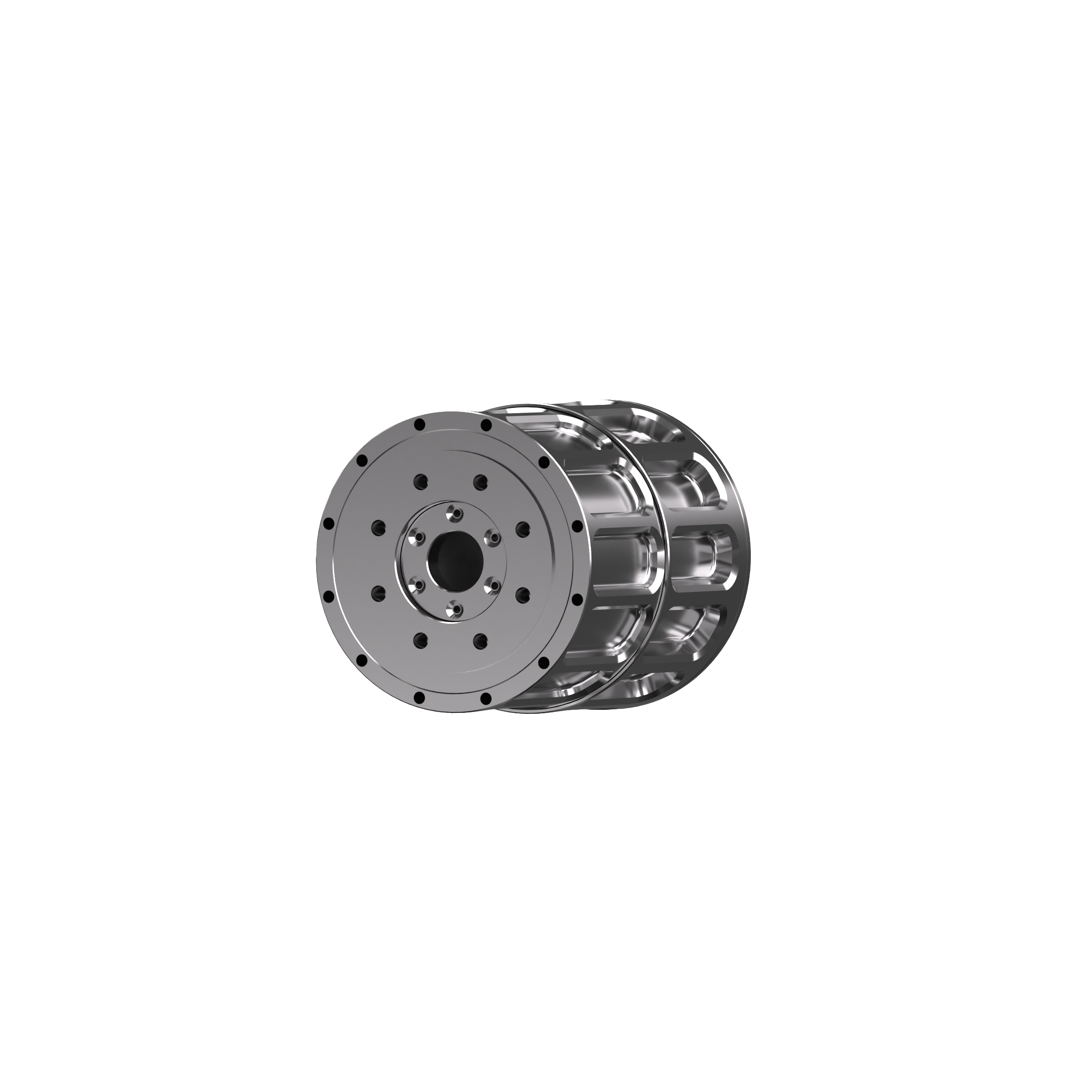
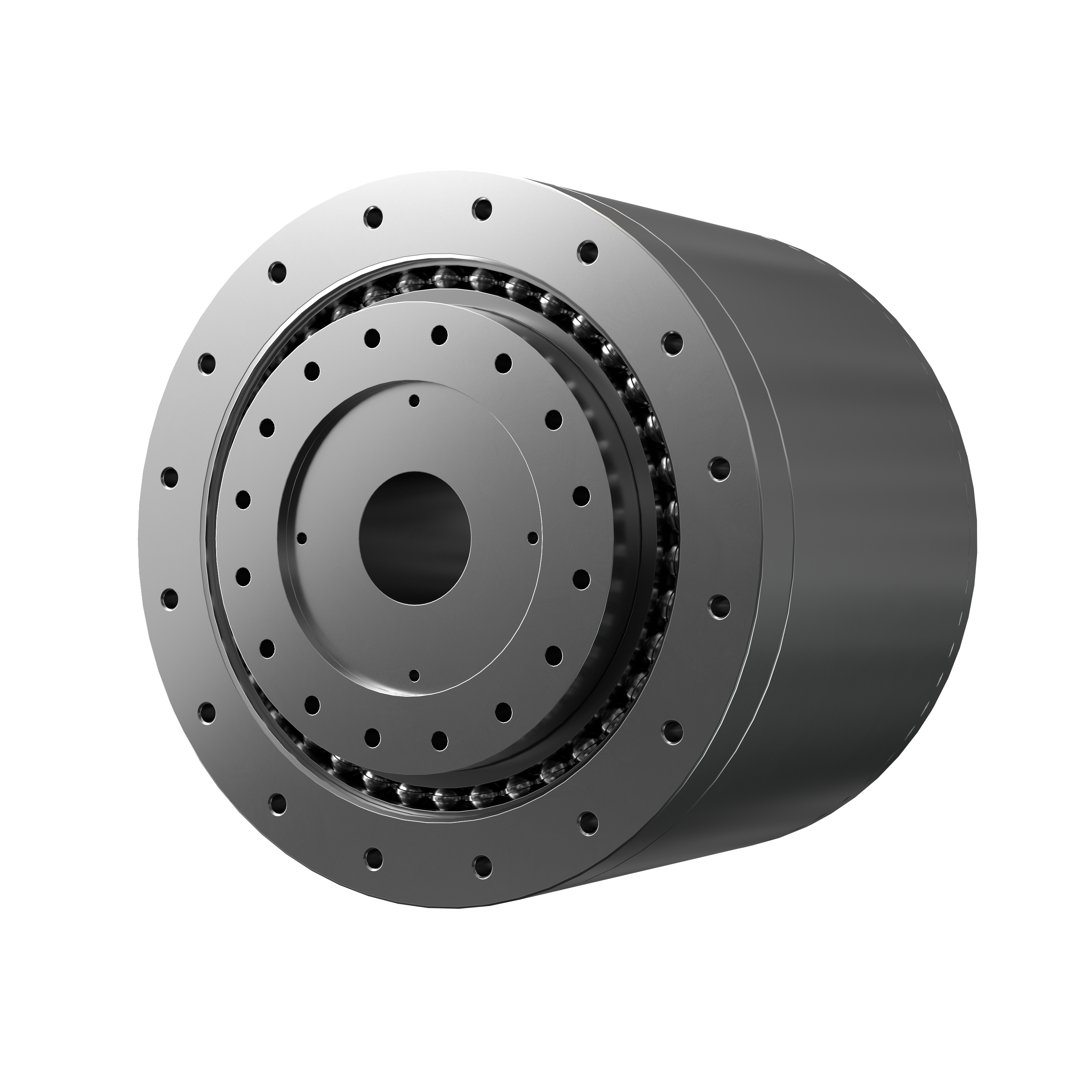
国盛动力定制化摆线关节,采用一体化封装结构,将减速器与电机及高精度编码器集成于一体。我们以高效率摆线传动为核心,实现高精度、高效率、高刚性的完美平衡。
我们可根据客户应用场景进行个性化设计,从输入输出法兰、安装界面到速比、扭矩、空心轴尺寸,均可灵活定制,实现从结构到性能的全面定制。满足不同载荷、速度、精度与空间约束。高可靠性、高刚性、高扭矩输出,为众多应用场景提供专属动力方案。
定制化摆线关节——从结构到性能,完全为你的机器人量身设计。
 下载产品手册
下载产品手册
全方位3D模型预览
使用鼠标拖拽旋转视角,滚轮缩放查看细节,全方位查看产品结构
产品参数
| 型号 | {{item}} |
|---|---|
| CD-60-J |
{{i}}
2D尺寸图
|
| GS-20T-J |
{{i}}
2D尺寸图
|
| GS-32T-J |
{{i}}
2D尺寸图
|
*表格数据仅供参考,详细参数请以官方规格书为准。
多行业应用解决方案
从人形机器人、机械狗到高精度写作的机器人,再到高负载的AGV物流小车,为不同场景提供最优传动
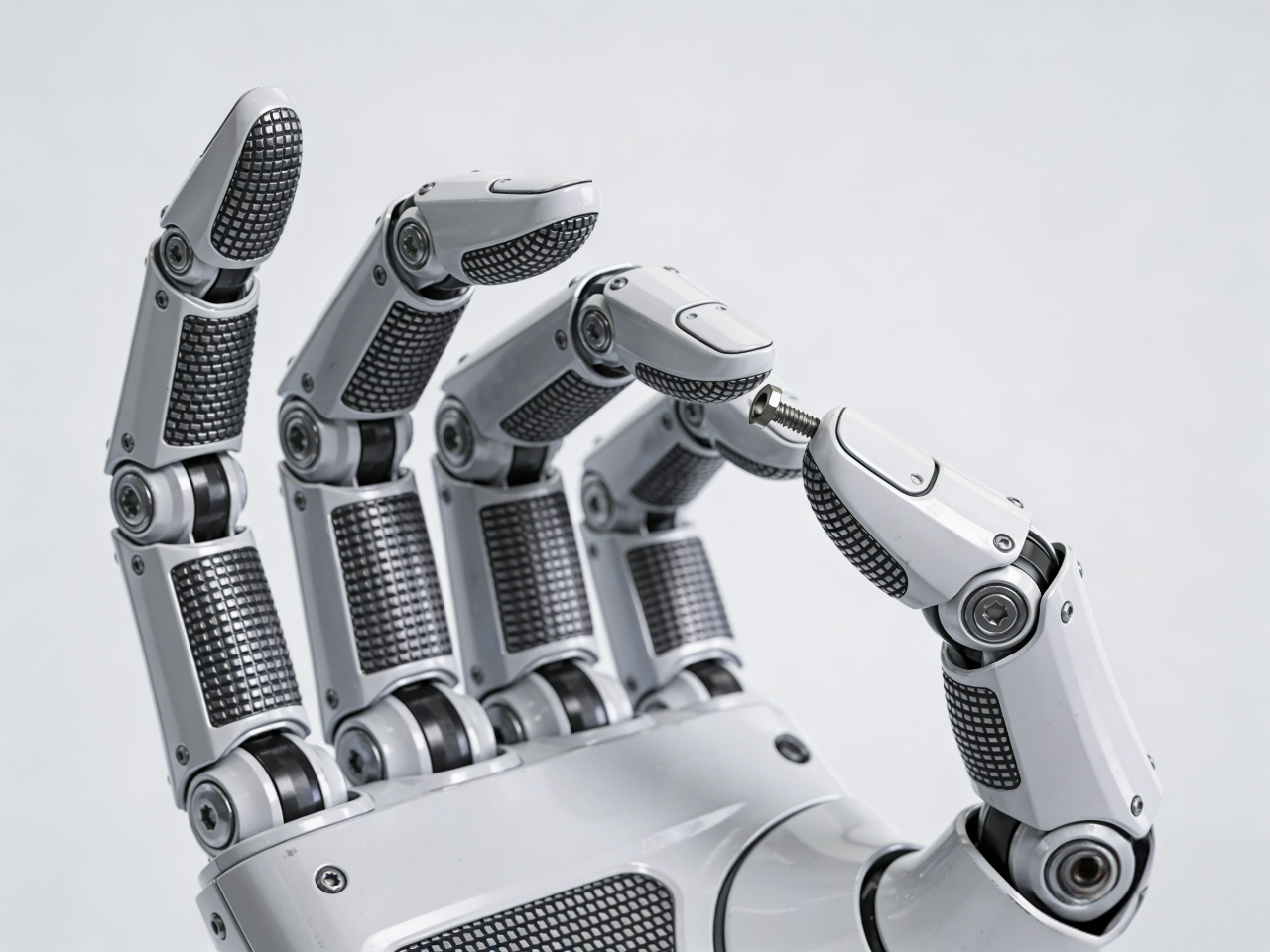
机器人灵巧手
{{ key }}

人形机器人
为人形机器人的各个关节提供极高的高功率密度与低返驱,确保运动的流畅性,轻量化设计减轻机器人负载。
{{ key }}

外骨骼机器人
摆线减速器以高精度、强扭矩、轻量化的优势,赋能外骨骼机器人更自然的步态、更稳定的支撑和更安全的每一步。
{{ key }}
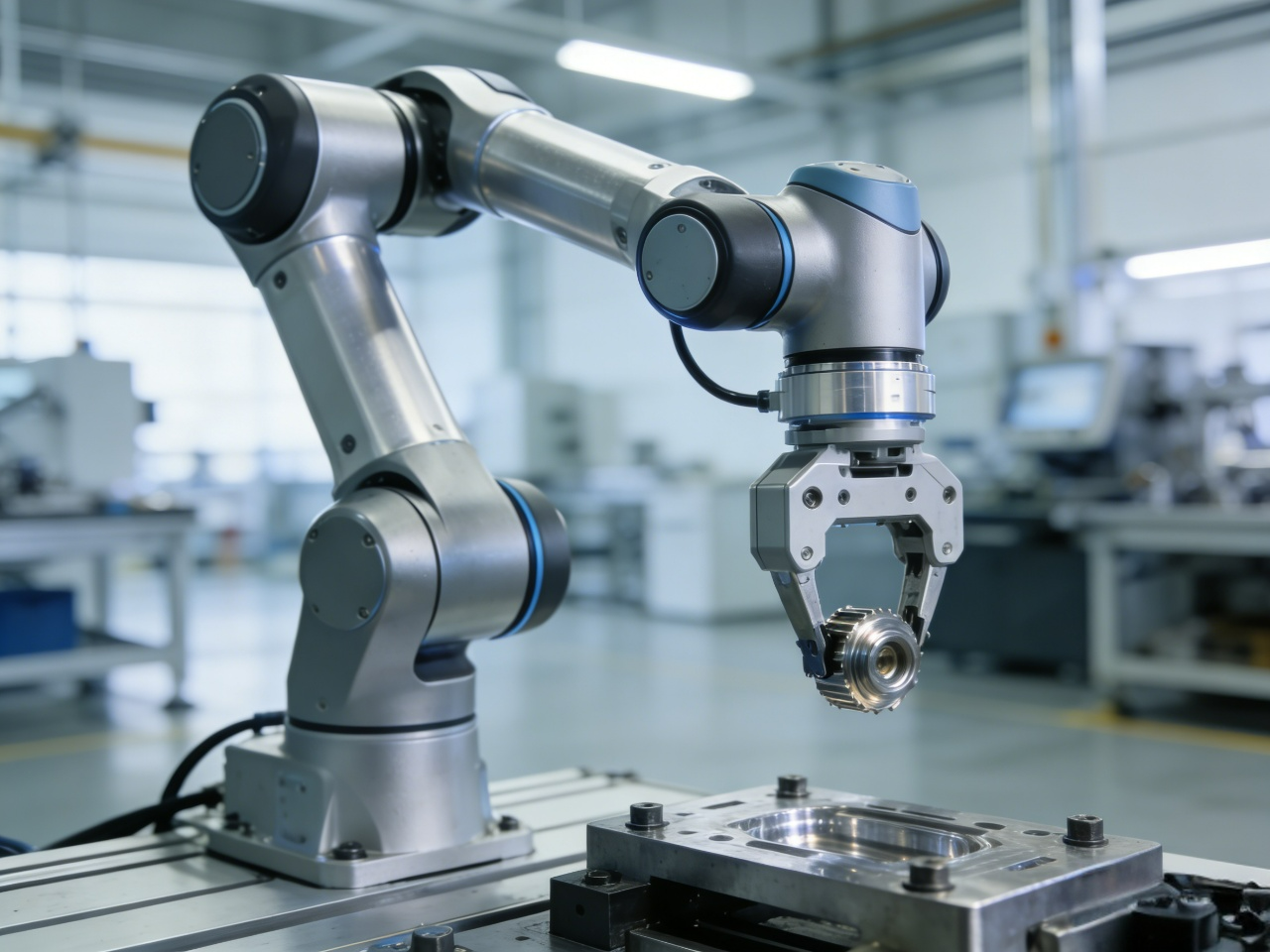
协作机器人/机械臂
精密控制与人机协作场景,需要平稳运行、低噪音,低背隙保证重复定位精度,轻量化设计助力实现人机协作,让协作更精准、更安全。
{{ key }}

AGV/AMR移动平台
承载能力强与高效率传动,延长续航,确保底盘运行平稳静音,适用于仓储物流自动化设备的轮毂驱动。
{{ key }}

四足机械狗
高抗冲击能力与紧凑设计,适应复杂地形的高频动态响应需求,关节需承受冲击荷,高扭矩输出,确保稳定行走与越障能力。
{{ key }}
机器人灵巧手
{{ key }}
人形机器人
为人形机器人的各个关节提供极高的高功率密度与低返驱,确保运动的流畅性,轻量化设计减轻机器人负载。
{{ key }}
外骨骼机器人
摆线减速器以高精度、强扭矩、轻量化的优势,赋能外骨骼机器人更自然的步态、更稳定的支撑和更安全的每一步。
{{ key }}
协作机器人/机械臂
精密控制与人机协作场景,需要平稳运行、低噪音,低背隙保证重复定位精度,轻量化设计助力实现人机协作,让协作更精准、更安全。
{{ key }}
AGV/AMR移动平台
承载能力强与高效率传动,延长续航,确保底盘运行平稳静音,适用于仓储物流自动化设备的轮毂驱动。
{{ key }}
四足机械狗
高抗冲击能力与紧凑设计,适应复杂地形的高频动态响应需求,关节需承受冲击荷,高扭矩输出,确保稳定行走与越障能力。
{{ key }}
需要专业的选型建议?
我们的工程师将在24小时内为您提供定制化方案